稳健探索 灵动自如 足式机器人外观设计案例
- 来 源:智能产品设计
- 发表于:2025.09.23
- 作 者:admin
- 人 气:2934
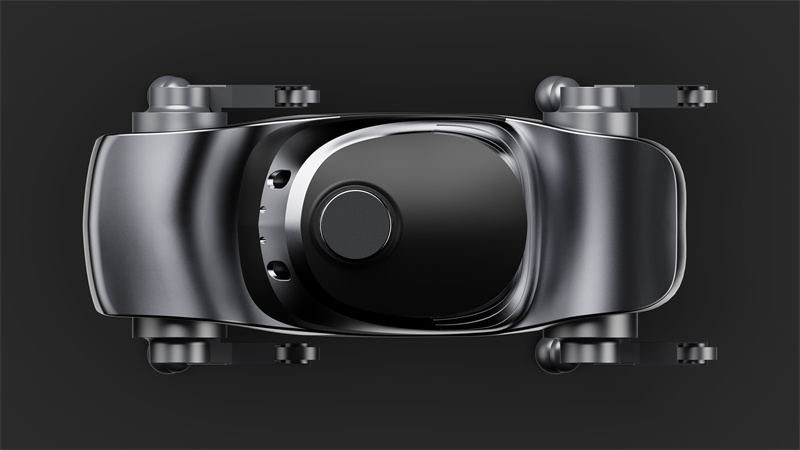
一、交互清晰,操控高效
该机器人注重实际操作中的易用性与反馈有效性。顶部操控模块布局直接,指令下达简单,配合清晰的交互逻辑,便于使用者快速掌握。
关节部分具备运动反馈功能,可通过实时数据了解机器人运行状态。
内置传感器能够感知环境变化,为路径规划与避障提供信息支持,提升任务执行可靠性。
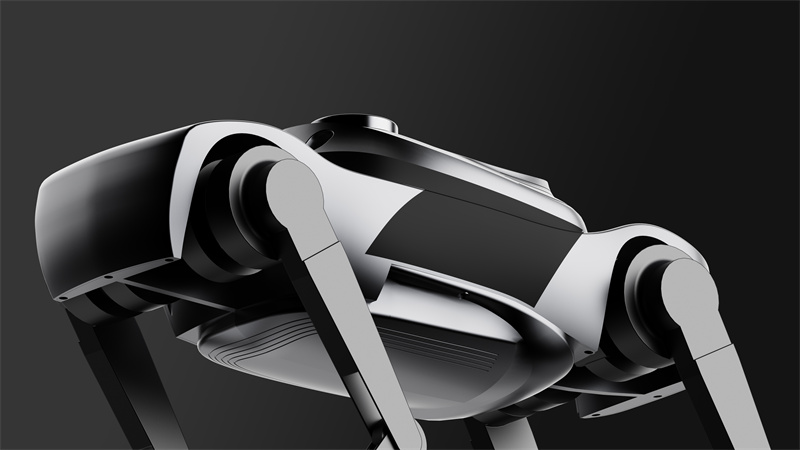
二、外观简洁,科技实用
整机以深色和金属色为主,外观简洁且结构外露,突出机械本身的功能性和技术质感。
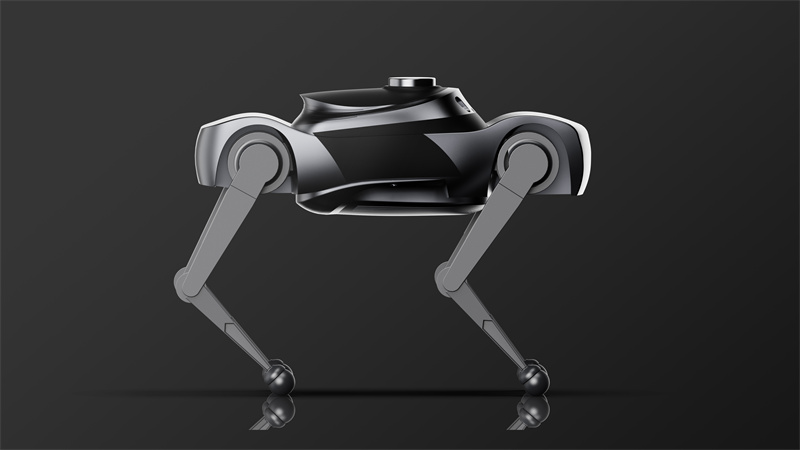
造型线条流畅,关节与传动结构可见,体现出运动机器的力量与灵活性。
机身标识清晰,整体风格与科研、勘探等应用场景相协调。
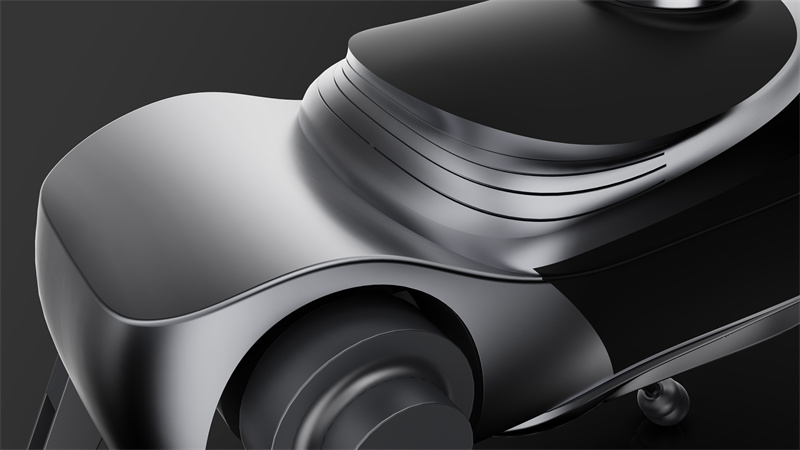
三、细节务实,稳定可靠
足端采用球形设计,增强对不同地面的适应性,有助于在崎岖或光滑表面保持稳定。
关节传动部分具备阻尼控制,减少运动噪音,适用于需保持安静的考察环境。
机身合理设置散热结构,保障长时间连续工作时的性能稳定。
四、多类场景,实用为先
在野外勘探中,该机器人能够穿越复杂地貌,协助完成数据采集与地形勘察;
在科研实验中,它为算法测试和运动规划提供真实实验平台;
在特殊作业环境中,如灾害响应或设施巡检,它可替代人力执行高风险任务,提升作业安全性。